Journal of Aeronautics & Aerospace Engineering
Open Access
ISSN: 2168-9792
ISSN: 2168-9792
Research Article - (2018) Volume 7, Issue 1
The blended wing body (BWB) concept is a relatively new concept of an aircraft. The wings and the fuselage blend into one integral structure greatly reduce drag and increases lift thus making it a highly efficient design. The aim of the research was to design a radio controlled small scale BWB aircraft for use over long ranges at low altitudes in order to deliver payloads. The BWB was divided into the center body and the outer wing. Four airfoils, HS522, LA2573A, NACA 25111 and MH78 were analyzed in XFLR5. In consideration of their lift and moment characteristics, NACA 25111 and MH78 were selected for the center body and the wing respectively. The stall speed and wing loading were the primary factors used in determining the area and size of the aircraft which converged to a design having a five feet wingspan. Center of gravity was placed ahead of aerodynamic center to provide static and dynamic stability in pitch. Twist, dihedral and sweep were given to increase stability and controllability. The final design was tested in XFLR5 for stability and in commercial computational fluid dynamic code ANSYS-Fluent for comparison. These simulation results were compared to wind tunnel tests of a 20% scaled down prototype. 3D Panel Method results in XFLR5 were found to be very close to wind tunnel results but CFD results were seen to be not conforming to the wind tunnel results after 10° angle of attack. Thus, CFD was deemed to be unnecessary for designing a plane of this size. Ultimately, a larger test prototype was made out of polystyrene foam and a successful flight was achieved.
<Keywords: Blended wing body (BWB); XFLR5; Computational fluid dynamics (CFD); Small Scale aircraft; Wind tunnel; Stability
The conventional tube and wing design has been popular for several decades and has nearly reached its asymptote of efficiency around the size of an Airbus A380 [1]. Depleting world resources have promulgated the need for developing higher efficiency air vehicles to reduce fuel consumption, environmental impact and cost. Blended Wing Body (BWB) is a new and novel concept that is gaining popularity very rapidly and promises a revolutionary change in the future of aviation [1]. The blending of the wings with the fuselage makes it aerodynamically more efficient. It does not have a tail that significantly contributes to drag generation [2]. Majority of lift is created by center body [2] thus eliminating the aerodynamically redundant fuselage from the conventional configuration [3,4].
In the first attempt, NASA Langley Research Center funded McDonnell Douglas [5] to design an aircraft carrying 800 passengers with a 7000-n mile range at Mach 0.85. The team considered a sphere, a cylinder and a disk, capable of carrying 800 passengers load. The disk configuration turned out to be the best option because of its lesser wetted area [5]. This led to the BWB being the best design for the purpose. Further, Lieback in his article explained that since the disc configuration has a 33% lesser wetted area and cruise lift to drag ratio is related to the wetted area aspect ratio, b2/Swet ; the BWB configuration is significantly better in all aspects [3]. A comparative study between a BWB and a conventional aircraft was carried out by Ikeda [6]. A conventional Airbus A380 was taken as the reference and a BWB was designed keeping the same mission profile requirements and a constraint of maximum wingspan of 80m due to airport restrictions. Simplified models for both aircrafts were made in Computer Aided Design and simulated in Computational Fluid Dynamics (CFD) software. The BWB greatly surpassed the A380 in aerodynamic performance and efficiency [6].
There are significant stability challenges with the BWB design. It does not have a tail and as the concept is novel it does not have enough data from flight tests or previous experiments. This issue was addressed by Martinez [7] in his research. He optimized the control surfaces area and achieved a 12% reduction in area from his baseline design, consequently reducing the drag and weight of the aircraft [7]. This showed that stability issues can be solved by design thus proving a BWB superior in all aspects. Thomson et al. [4] made a 5-meter wingspan BWB unmanned air vehicle (UAV). Stability was improved by moving center of gravity in front of the center of pressure and by using reflex airfoils to reduce aerodynamic moments [4]. Dehpanah and Nejat [8] placed an external mass that could move along the centerline to provide stability in pitch. Kuntawala [2] had added dihedral, twist, and sweep in the outer wing of the BWB to improve its stability and delay stall.
XFLR5 is very reliable software for modeling small planes but not for large aircrafts [9]. Vortex Lattice Method (VLM) and 3D-Panel Method are two common methods for analyzing planes in XFLR5. VLM is independent of the wind speed (is linear) and will give reliable results for all kinds of wings [9]. The 3D-Panel method is a refined form of VLM and takes into account the full 3D characteristics. It takes wing thickness in consideration whereas VLM only considers the mean camber line [9]. XFLR5 has been used by Martinez [1] in analyzing wings and a BWB model at Mach 0.3 by VLM and 3D-Panel methods to find lift, drag and stability of an aircraft. It was also used by Hassanalian et al. [10] to design a micro air vehicle and the analysis of its lift and drag forces.
The goal of this research was to construct a very efficient plane that can cruise for long distances for long hours and carry a significant amount of payload. BWB, because of its proven advantages of efficiency and its payload capacity, was the best choice. The BWB concept has majorly been studied for its use in passenger aircrafts, and hardly ever has its use in small scale aircrafts has been analyzed. Utilizing its superior aerodynamic benefits in small scale aircrafts will yield significant benefits. A goal was to make the design approach simple and efficient. Thus, XFLR5 was used because of its relative simplicity and reliability. Analysis was also done in CFD software in ANSYS-Fluent to compare the results with the wind tunnel experiments. The present study also discusses the final 5 feet prototype that was constructed from polystyrene foam and its successful flight.
An extensive analysis of all the aspects of the design was carried out. Mentioned below are the salient points of the whole design process.
Air-foil selection
The BWB was divided into two parts – the center body and the outer wing. The majority of the lift was to be produced by the center body and the wing would have the control surfaces to maneuver the airplane. Therefore, a high lift co-efficient (CL) airfoil was required in the center. It was realized that with high CL (high camber) comes a relatively more negative moment of coefficient (CM) [4] thus the outer wing must have a positive CM in order to balance out its effects. CM contributes significantly to the longitudinal stability of tail less aircrafts since they do not have a tail to counter the negative pitching moment (nose down) of the cambered airfoils [11]. Several airfoils were analyzed and the list was later shortened to only reflex airfoils because of their higher longitudinal stability [12]. After reviewing the commonly used airfoils for flying wings and BWBs and analyzing their feasibility in the given case, the list was shortened to only four airfoils: LA 2573A, HS 522, MH78 and NACA 25111.
XFLR5 was used to analyze these four airfoils and graphs showing variation in, CL, CM and efficiency at various angle of attack (AoA)’ are shown in Figures 1-3 respectively. The results are summarized in Table 1.
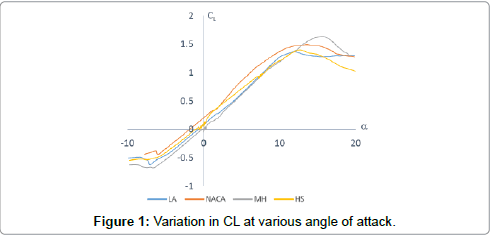
Figure 1: Variation in CL at various angle of attack.
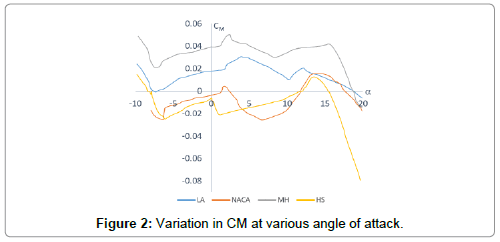
Figure 2: Variation in CM at various angle of attack.
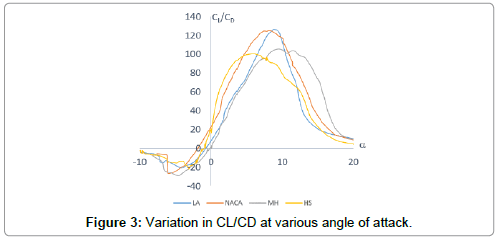
Figure 3: Variation in CL/CD at various angle of attack.
The goal is to make the center body acting as the main lift generating portion; hence an airfoil which provides maximum CL is to be selected. Pitching moment can be compromised to an extent provided it does not become too negative. From Table 1, NACA 25111 is the best possible option to be used in the center body. NACA 25111 has highest CL. Negative CM in NACA 25111 can be compensated by using an airfoil having positive CM in the outer body. The outer wing was assumed to play more important part in stability than in producing lift. Thus to counter the negative moment by NACA 25111, the airfoil used in this section needs to have a higher positive CM. According to the results, MH 78 is the airfoil with the highest positive moment. Thus it was selected for the outer wing.
| Air-foils | Cl (α=5°) | Average CM (0°<α<10°) | Max. Cl/Cd (efficiency) |
|---|---|---|---|
| LA 2573A | 0.62 | 0.02 | 123 |
| HS 522 | 0.70 | -0.01 | 100 |
| MH 78 | 0.60 | 0.04 | 10 5 |
| NACA 25111 | 0.82 | -0.01 | 122 |
Table 1: Summary of XFLR5 simulation results.
Critical performance parameters
Wing loading, stall speed and the maximum lift coefficient are essential to determine whether the plane will fly or not. The aircraft is to be designed such that it stalls below 10 m/s. The main portion of the lift is generated from the center body. Additionally, a 2°degree twist has been given to the center body to ensure that it stalls first. Therefore, if stall condition is applied only to the center body then the minimum wing loading can be found.
From Figure 1, it can be noted that the maximum CL is approximately 1.4 for NACA 25111. The following lift equation can be used to calculate the wing loading [13].
 (1)
(1)
Where the left side denotes the wing loading (weight/area), ρ is the air density, vs is the stall speed and is the maximum CL. The equation (1) yields a wing loading of 85.8 N/m2. Any velocity less than 10 m/s at the max CL will cause the plane to stall, thus this is the minimum wing loading that is to be achieved.
The expected weight of the plane including the battery, motors, electronics and the payload (1200 g) is approximately 2.4 kg. Thus working with the equation will give us a minimum area of 0.27 m2. The plane was then designed in such a way that the area of the center body was 0.32 m2, well above the limit.
Center of gravity, twist, dihedral and sweep
Till now, the air-foils that are to be used and the total wing area required to keep the aircraft in the air have been determined. Using the already determined total wing area, which was required to keep the aircraft in the air and the knowledge accumulated from literature review of previous models considering the fact that there are certain features common to BWB aircrafts; the conceptual design was given proper configuration. It was determined that it is best suited to use seven air-foil sections in the plane and to interpolate the surfaces in between. NACA 25111 was used at first four sections (the center body). MH 78 was used in the outer wing. Several other features were also incorporated in the design.
Center of gravity
BWB is very unstable in pitch because of lack of tail section. Setting the center of gravity (CG) ahead of the neutral point of the aircraft is essential for the plane to be statically and dynamically stable [4,14]. This will ensure that the aircraft recovers from any disturbance. The neutral point was found from XFLR5 by moving the CG back and forth. It was ensured that the center of gravity is placed ahead of it.
Winglets
High pressure on the lower surface of the wing creates a natural airflow that makes its way to the wingtip and curls upward around it. This produces wingtip vortices and induces drag. Winglets help reduce the strength of wingtip vortices [12]. Thus, they were added at the wing tip.
Dihedral
A positive dihedral is given to improve roll stability of an aircraft. It makes a plane self-stable, i.e., able to restore its stable position after a disturbance [15]. Thus a positive dihedral was given at the end of wingspan to improve roll or longitudinal stability.
Sweep
A sweep was given because of many reasons. A sweep improves the yaw or lateral stability of an aircraft. After a disturbance the drag forces change their moment arm on both wings enabling the aircraft to return to its original position [13]. A wing sweep will also help to increase the area of control surfaces and increase their moment arm from the center of gravity of the aircraft. Moreover, vertical stabilizers were placed at winglets to enhance yaw stability.
Twist
Twist can be either geometric or aerodynamic. Geometric twist involves varying the wing incidence angle along the span. Aerodynamic twist involves changing the airfoil section along the span [11]. A positive physical twist in the center body airfoils was given to ensure that the center stalls first and the pilot has time to react before the stall reaches the control surfaces on the outer wing and reaches the wing tip [16].
With respect to desired thickness at a given cross section, the corresponding air-foil was sized to that thickness percentage using XFLR5. Top view and seven sectional side view sketches with varying thickness were imported from XFLR5 to SolidWorks and a desired chord length was decided for all the sections. The thickness and chord length was decided so that the space inside the plane can be maximized without compromising the aerodynamics or structural continuity.
The final configuration given in Figures 4 and 5 shows the complete 3D model. The air-foil configuration is shown in Table 2.
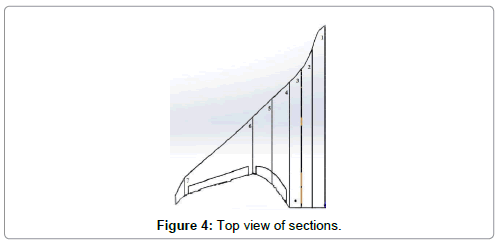
Figure 4: Top view of sections.
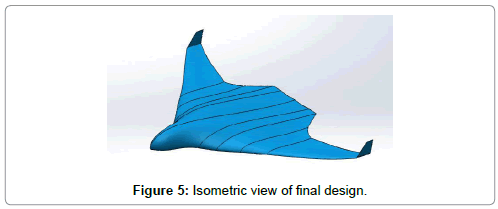
Figure 5: Isometric view of final design.
| Section # |
From center chord /in |
Offset (from center)/in |
Chord/in | Air-foil name | Thickness % |
Twist/° | Dihedral/° |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 31.0 | NACA 25111 | 11 | 2 | 0 |
| 2 | 2 | 3.5 | 27.5 | NACA 25111 | 11 | 2 | 0 |
| 3 | 4 | 7.5 | 23.5 | NACA 25111 | 10.6 | 1 | 0 |
| 4 | 6 | 9.5 | 21.5 | NACA 25111 | 8.2 | 0 | 0 |
| 5 | 9 | 12.6 | 14.5 | MH 78 | 6.9 | 0 | 2 |
| 6 | 12.3 | 15.8 | 9.5 | MH 78 | 5.2 | 0 | 2 |
| 7 | 24 | 28.0 | 3.0 | MH 78 | 4 | 0 | - |
| Aspect ratio 4.6 |
CG 16.31” from Y |
Taper ratio 0.1 |
Wing Area 658 in2 |
||||
Table 2: Final plane configuration.
The center body can be approximated to be a trapezium thus its area will be:
A= ½ (height) (sum of parallel sides)
where,

and

This gives an area of 498 in2 equivalent to 0.32 m2. The real area will be less than this due to approximation but will be greater than 0.27 m2. Thus it satisfies the wing loading condition as mentioned in section 3.2. Also, an area of 160 in2 remains for the outer wings, this shows that the lift produced here will be a relatively small portion of the overall lift. This again emphasizes that the center body produces most of the lift.
The analysis of the whole plane was carried out using two softwares. XFLR5 was used to find lift and carry out stability analysis due to its inbuilt modules. Fluent, ANSYS was used to find the lift at varying angles of attack so that the validity of the results can be compared.
XFLR5 analysis
The plane was analyzed in XFLR5 for lift and stability in pitch and yaw.
It can be seen from Figure 6 that the lift has nearly a linear relation with AoA. With increasing AoA, the lift also increases thus is making sense and is very intuitive. This can be corroborated by the graphs [8,14]. The curve in Figure 7 is downward sloping which entails that:
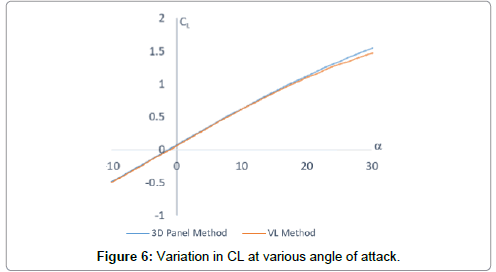
Figure 6: Variation in CL at various angle of attack.
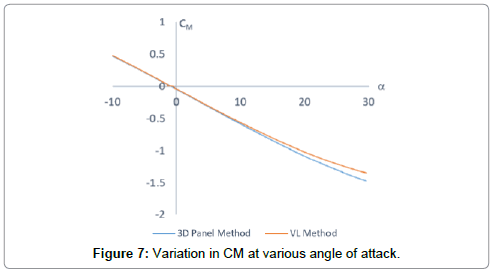
Figure 7: Variation in CM at various angle of attack.
 (3)
(3)
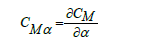
And this is an essential condition for static longitudinal stability [13]. Although the line does not pass directly through the origin, trim conditions can be applied to achieve stability at any desired angle of attack [14]. Further, Figures 8 and 9 show the dynamic stability in pitch and yaw respectively. After a disturbance is given to the aircraft it will oscillate and return to its stable state. Thus the aircraft is both statically and dynamically stable.
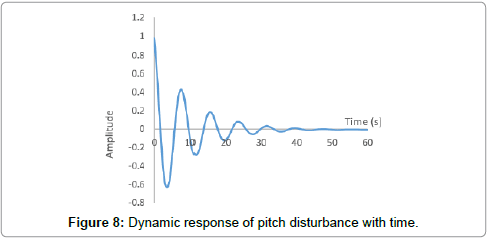
Figure 8: Dynamic response of pitch disturbance with time.
Figure 9: Dynamic response of yaw disturbance with time.'
Fluent analysis
CFD analysis was performed to find the lift and drag more accurately. A 3D steady flow solver was used with the simple algorithm. A free tetrahedral mesh was used mainly because of the complex geometry [17] involved and a body of influence was given in the downwash region to capture the effects of downwash very precisely. Inflation was applied at the boundary to improve resolution. The image of the mesh is shown in Figure 10. The one equation model Spalart-Allmaras was used. The Spalart-Allmaras model is designed specifically for aerospace applications involving wall-bounded flows and has been shown to give good results for boundary layers subjected to adverse pressure gradients [18]. Spalart-Allmaras model is effectively a low- Reynolds-number model, requiring the viscosity-affected region of the boundary layer to be properly resolved [18]. The model has a wall bounded flow, is a low Reynold number flow (because of low speeds and small aircraft), and the viscosity affected region, the boundary layer, analysis is crucial. Thus, it matches the problem setup. A mesh independence study was carried out using five different meshes. The final mesh took approximately 30 hours to converge on an i7-3400U processer at 3.4 GHz.
Figure 10: Mesh of the BWB.
The pressure contours in Figure 11 show the highest pressure, the stagnation point, at the nose tip. The pressure over the center body is negative showing that it is contributing to the lift. The pressure is very low at the wing’s leading edge showing that it is contributing to the lift too. However, due to the fact that the center body has the greatest area and shows a significant pressure reduction, it will be the main lift generating body (Figure 12).
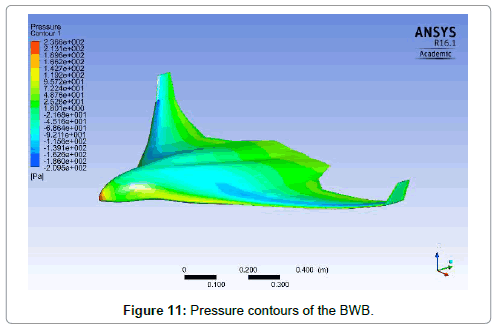
Figure 11: Pressure contours of the BWB.
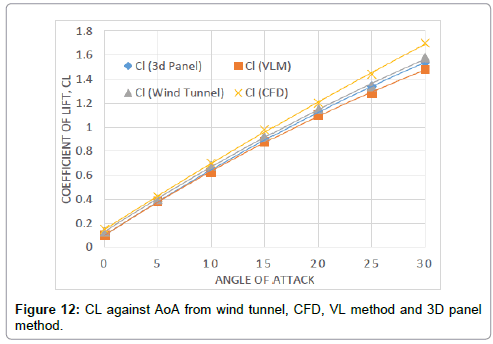
Figure 12: CL against AoA from wind tunnel, CFD, VL method and 3D panel method.
Wind tunnel testing
To verify the CFD results a 20% carbon fiber prototype was made and tested in a wind tunnel. The model is shown in Figure 13. The prototype was 30 cm in wing span and was made with a single sheet of carbon fiber. The wind tunnel speed was varied from 5 m/s to 25 m/s in 5 m/s intervals and the data was recorded. The values of CL were then found for all readings and values of the same AoA were averaged to give an averaged CL at every AoA.
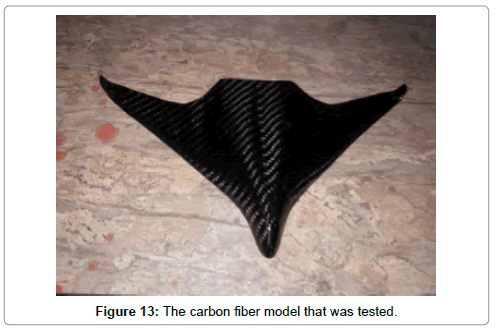
Figure 13: The carbon fiber model that was tested.
The results of CFD and the wind tunnel testing have been plotted in Figure 12.
It can be seen that CFD results are close to wind tunnel results at small angle of attacks (<10°) but diverge at higher AoA. The XFLR5 results are very close to the wind tunnel results, particularly, 3D Panel Method result. The VLM slightly under predicts the lift after 20°. This discrepancy is minimal and can be explained by the fact that 3D Panel is more accurate because it captures all 3D effects and takes the thickness of the wing in consideration [9]. The CFD results have a tendency to often overestimate results thus it does not come as a surprise that CFD results are higher than the wind tunnel results. However, it can be seen that CFD is a highly computationally intensive tool and does not provide a convenient and quick enough way to rightly predict the lift. XFLR5, on the other hand, is ideal for designing a small plane and can be relied upon without cross checking from CFD.
Flight
The final plane was made out of polystyrene foam by using hot wire cutter and ply wood ribs. It was made in pieces of Styrofoam that were then glued and attached with carbon rods to give strength. It was tried to exactly translate the CAD model in physical form but precision errors would always be there as the foam was cut manually using manual operations.
Finally, the plane was made and it was made aesthetically appealing by painting on it as shown in Figure 14. An Emax BL2820 motor was used. A 5200 mAh Lithium Polymer battery was used to power it. The plane made a successful take off and landed perfectly. The flight visually showed characteristics of the plane being stable and able to lift a payload of 1200 g. However, due to lack of facilities in manufacturing an exact copy of the final model could not be made and tested. Thus, the conclusions drawn from this flight are limited.
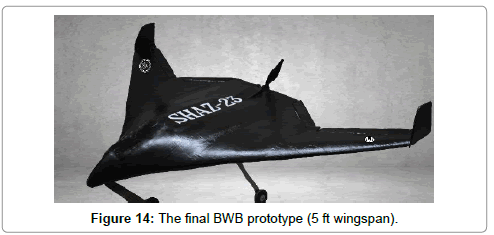
Figure 14: The final BWB prototype (5 ft wingspan).
The center body and outer wing approach that was used in designing the blended wing body turned out to be a relatively simple but powerful approach. Through this approach, the task of airfoil selection was made easier and more intuitive – a high lift airfoil was the criteria of the center body and a high moment airfoil was the criteria of the outer wing. It was also relatively simple to deal with stall speed and the wing loading because no averaging of coefficient of lifts for different airfoils was required when only the center body was used for calculations. Also, after outlaying the seven sections (Table 1) it was easy to decide where to give dihedral, twist or sweep. The design then underwent analysis in XFLR5, CFD and wind tunnel. The results were compared and wind tunnel results matched most closely with 3D Panel Method results in XFLR5. CFD was deemed to be unnecessary for designing a small scale BWB. The design made in this research is highly efficient and stable. The same process can be used for designing larger BWBs such as to be used as UAVs, parcel delivery, etc. There is still room for doing extensive CFD analysis and assessing the possibility of it being better than XFLR5. It is also possible to further improve this design by performing optimization or iterative studies by changing the twist, dihedral and sweep and noting its effect of lift, drag and moment.