Journal of Biomedical Engineering and Medical Devices
Open Access
ISSN: 2475-7586
ISSN: 2475-7586
Review Article - (2016) Volume 1, Issue 1
Keywords: Topography; Electrooculography; Ultrasound device
Current methods of tracking eye movements fall into several categories, based on the technique used. These include Electrooculography (EOG), Scleral Coil, Video Oculography and Infrared Oculography. As technology to record eye movements has advanced, so has our understanding of eye movements and their relationship to the neurology of the brain. The research into fast eye movements, or saccades, has provided insight into modeling of the oculomotor plant [1-4]. Abnormal saccades have been identified as indicators of neurological disorders such as schizophrenia and Parkinson’s disease [5,6]. Recently, much attention has been given to the assessment of Mild to Moderate/Severe Traumatic Brain Injury (MTBI and M/STBI). The CDC reports that every year in the United States over 1.5 Million people experience Traumatic Brain Injury with approximately 75% of those being classified as a MTBI. It has been found that patients who have experienced a MTBI event have saccades that differentiate from those without an MTBI event [7,8].
While the eye measurement recording technologies previously mentioned are all capable of measuring eye movement, some of these devices are more suited to measure smooth pursuit (following an object or reading) not fast pursuit (saccades). In other words the sampling rate of the device is too slow to accurately capture a saccade. Devices designed for fast eye measurements may be also limited in that they are designed for use in a clinical or laboratory environment. This lack of portability prevents them from being used as an onsite tool to assess a MTBI event in real time. Technological limitations found in some of the existing devices include; unable to track more than one eye (binocular data recording is not possible), unable to simultaneously track eye movement with three degrees of freedom (horizontal, vertical and torsional), cannot be used by wearers of glasses or contact lenses and the previously mentioned maximum sampling rate.
It is proposed that the aforementioned limitations can be overcome by developing a non-contact ultrasound based measurement system. Contact ultrasound has been used extensively to measure structures of the eye and to a limited extent to measure eye movement. However, a non-contact ultrasound system for the measurement of fast eye movements does not exist. The device design takes into consideration power consumption, size, weight and comfort. It is anticipated that the design will consist of several major components. A wearable set of glasses/goggles, a transmitting system, a data storage system and an analysis system. The glasses component (or data acquisition unit) will contain the transducers which acquire raw eye movement data, the transmitting unit will send the acquired data to a storage device. The storage device will collect and store the raw data and the analysis system will extract the saccade information from the raw data. With the exception of the glasses assembly itself, which would need to be customized to retain the ultrasound sensors, other components are available as off-the-shelf products. Ultrasound emitters and detectors are readily available for purchase, as are Bluetooth modules for data transmission. Sending physiological data, via Bluetooth, for storage, analysis and display has already been documented [9].
Basic system
A schematic diagram of the system under consideration is given in a simplified two-dimensional drawing (Figure 1). A pressure wave originating at the transducer will travel a distance “d” and be reflected off the eye and a portion of that signal will return to the transducer. When the eye does not move the distance “d’ is fixed and the total time “T”, to send and receive a signal will remain the same. As the eye rotates in either direction, as shown by arrow “a”, the distance from the transducer to the eye will vary based on the part of the eye that is reflecting the ultrasound signal. When the signal reflects off any part of the scleral the distance “d’ will remain the same. However, when the transducer is reflecting off of the cornea the distance “d’ will change with eye position with respect to the transducer. By measuring the changes in travel time “T” the eye rotation and velocity can be obtained.
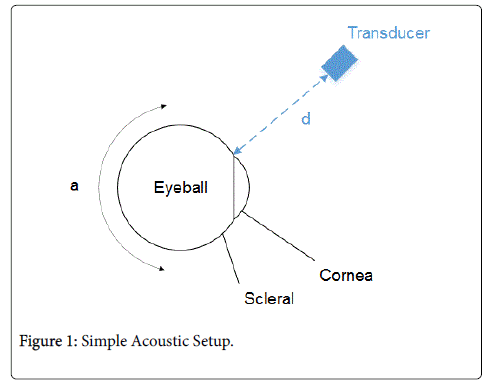
Figure 1: Simple Acoustic Setup.
In reality, the surface of the eye is not a perfect sphere and the exact shape and size varies from person to person. To account for this in a physical system a calibration procedure would be needed. Here the subject would move their eyes from position to position and the signal travel time would be recorded. Thereby, when making a saccade measurement this reference time would be used to determine the eye position. Hence the topography of the eye is used to determine position.
The transducer is air-coupled. The velocity of acoustic waves in different mediums has been well documented and for our purposes, we will consider the velocity only in air and ocular tissue. The speed of sound in air changes with environmental conditions such as temperature and humidity. For our studies we will consider these variables to constant and use the value of 343 m/s as the speed of sound in air. The acoustic properties of the different ocular tissue also vary, however, we will also consider this to be a constant and use a value of 1553 m/s.
As a signal travels through a medium it is attenuated and its intensity is reduced. The attenuation is given by the equation;
A=A0 e-az eqn(1)
Where A is the signal at some distance (z), a is the attenuation coefficient and A0 is the original signal amplitude. The attenuation coefficient of air, again holding temperature and humidity at a constant value, is at 40 kHz, 460 dB/km or 0.00046 dB/mm. Attenuation, increases as the frequency increases, quadrupling as it goes from 40 kHz to 100 kHz. Since many of the off-the-shelf components utilize 40 kHz as a center frequency we will use that as a starting point. In our system we expect that the signal will need to travel approximately 50 mm round trip. For amplitude of 1 the value of an in equation 1 works out to be 0.997. This indicates there will be limited attenuation due to the travel in air.
The acoustic impedance (Z) of a material is the density (?) times the acoustic velocity (?) of the material.
Z=ρυ eqn(2)
When a pressure wave reaches a boundary the difference in impedances determines how much a wave is transmitted through the material and how much is reflect back. As given by equation 3,
 eqn(3)
eqn(3)
where R is the percentage of wave reflected and Z1 and Z2 are the impedances of the two materials. Ocular tissue can be taken as having an acoustic impedance of 1.71 × 106 kg/m2s while air is 413.3 × 106 kg/m2s. So at the air-eye interface we can expect R to be approximately 0.983. Which means close to 100% of the signal that reaches the eye should be reflected.
If we treat the ultrasound wave as a number of individual vectors each hitting a single point, normal to the cornea’s curved surface then we would expect the signal to be completely reflected back along the line of transmission. However, waves will hit the curved surface of the eye at numerous angles and not all the wave will be reflect back along the path of origin.
In our system there will be some loss due to all the following factors, absorption of the wave due to impedances differences between the air and ocular tissue, and the waves hitting at a non-normal incident angle.
Lastly we need to be concerned with wave interaction and interference. When waves are in phase, their amplitudes will sum and when out of phase they cancel each other out. This will be important when using multiple transducers in our system.
From the brief discussion above an ultrasound system should be feasible. There will be minimum losses due to attenuation of the signal in air if operating at low frequencies or loss to due impedance differences at the eye-air boundary. However, the amount of signal loss due to interference, wave divergence and reflection is unknown but will need to be considered.
COMSOL model
A COMSOL Model using the Pressure Acoustic Transient Interface Physics was used. The complex geometric models of the eye and eyelid (Figure 2) are designed in Solidworks and imported into the model. Other, less complex structures are designed using the geometry feature of COMSOL. To simplify the simulation all geometries, with the exception of the eyeball, were given the material properties of air. A predefined muscle material provided by the COMSOL program was chosen as a starting point for the eyeball material properties. These properties were then modified to more closely match those of the ocular tissue.
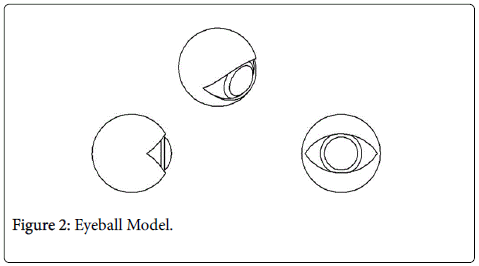
Figure 2: Eyeball Model.
Four waveguides (Figure 3) were designed to help with signal loss due to divergence and scattering. The waveguide consist of two concentric cylinders. The centermost cylinder contained the source signal and the outmost was used as a receiver. The waveguides are located to the left and right, above and below the eye (Figure 3). The horizontally placed waveguides were aimed at the intersection of the cornea tissue and scleral tissue. The vertical sensors could not be positioned in that way since the eyelid hides that intersection. So the vertically placed sensors were positioned such that if the source waveguide was extended it would be on the cornea and not on the eyelid and angled more towards the center of the eye. The simulation used a 100 KPa, 20 KHz Sin pulse which was generated for 12.5 µsecs. The eye was rotated from -15 to +15 in 5 steps. At each step the simulation was allowed to run for 165 µsecs.
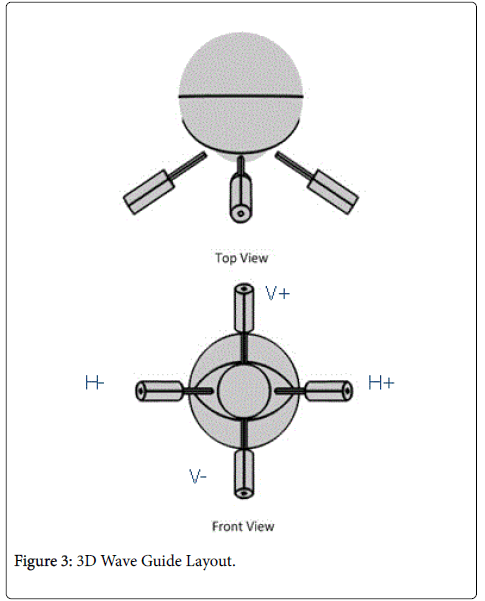
Figure 3: 3D Wave Guide Layout.
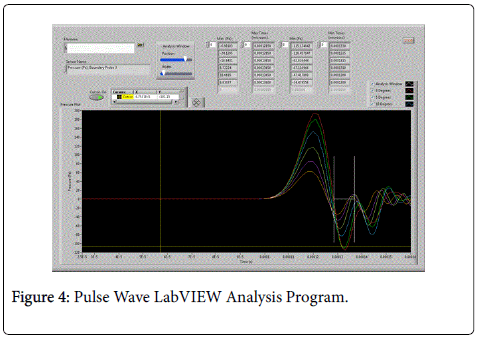
Figure 4: Pulse Wave LabVIEW Analysis Program.
Since the total travel time for a wave is less than 250 µsecs, each of the four waveguides could generate a pulse wave and have it return within 1 msec. This would be a sampling rate of 1000 Hz which is more than sufficient for a saccade measurement, and better than many of the existing systems. The simulation was modified so that each of the waveguides would generate and receive the source pulse at an intervals of not to exceed 250 µsecs. This would help eliminate any interference or mixing of signals as each waveguide would only be active for 250 µsecs.
Analysis of collected data plays an important role in understand simulation results. With large data sets manually plotting and calculating results not only take a significant amount of time but can lead to errors. To aid in data analysis a LabVIEW Program was developed to analyze the Pulsed Wave Data.
The Pulse Wave LabVIEW Analysis Program has the following features;
Uses a single output file from COMSOL
Plots pressure versus rotation from a single sensor select by user
Plots are colored coded and identified by an auto-generated legend
Control to select to display all or only certain positions in the rotation
A polynomial best fit plot can be added
An X-Y curser can be added to the plot
An adjustable analysis window is superimposed on the graph and allows automatic calculation of;
Maximum or minimum amplitude within the window for each plot
Time position for each maximum and minimum within the window
Simulations were run for a horizontal eye and vertical eye movements. In the simulations the eye moved from the -15 position to the +15 position in five degree steps. The results of those simulations are seen in Figures 5 and 6. The total signal travel time for each sensor is plotted versus the position of the eye. In some cases the sensors in the same plane (H or V) have equal values so they appear as a single plot in the figures.
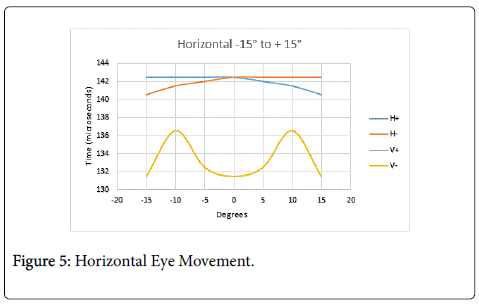
Figure 5: Horizontal Eye Movement.
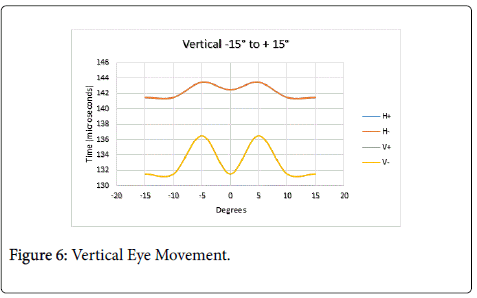
Figure 6: Vertical Eye Movement.
For the horizontal eye movement the two sensors in the horizontal plane (H+ and H-) returned the same travel time of approximately 142.5 µsecs when the sensor is receiving a signal reflected off the scleral of the eye. When the cornea of the eye is moving in front of the sensor the travel time decreases as the apex of the cornea moves towards the center-line of the sensor. The vertical sensors (V+ and V-), during the horizontal movement, track the curve of the cornea from 0 to approximately ± 10° respectively, at which time the sensors transition from the cornea to the eyelid, which being closer to the sensor, results in a decrease in the travel time.
During the vertical eye movements the two sensors in the horizontal plane (H+ and H-) are tracking the curve of the cornea. As the eyes moves in the vertical position the H sensors move off the cornea to the scleral resulting in a slight increase in travel time. At approximately ± 5° the travel time decreases as the H Sensors encounter the eyelid. The vertical sensors track along the curve of the cornea from 0 to approximately ± 5° at which time the V sensors transition from the cornea to the eyelid resulting in a shorten travel time.
Presented is a 3D Finite Element Simulation of an ultrasound based eye tracking system. Results of the simulation show that within the 15° range tested it is possible to determine eye position using ultrasound. The use of ultrasound should now be considered as a viable means to measure eye movement. The ability to incorporate ultrasound into a small, portable device will allow the measurement of saccade data from MTBI events immediately after occurrence as well for long term studies. Similarly long term tracking of saccades associated with neurological changes will be more easily tracked. Future work will involve incorporating a moving mesh into the finite element simulation so that the rotation will not be static, but velocity dependent. This will allow direct comparison between the simulation and recorded human saccade data.